1.实验室简介
实验室面向各类具身智能应用场景,重点研究具身智能机器人,具身智能低空系统,具身视觉语言导航,具身智能实训-数采中心等关键技术。配备 RTX 4090与A6000服务器等高性能GPU算力资源;拥有宇树顶配人形机器人、方舟LIFT升降机械臂、ALOHA协作机械臂、四足机器狗与轮足式机器狗、多传感器SLAM融合测试平台及3D打印机等成套硬件平台,可支撑从算法研发到系统集成与原型验证的全流程实验。团队现有博士硕士研究生近三十名,面积近300平方米。
2.研究方向
2.1.具身智能机器人
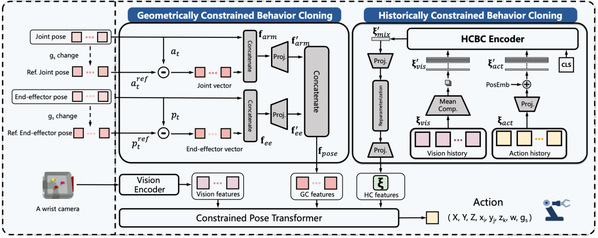
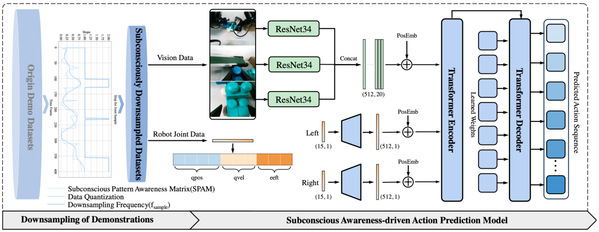
2.1.1.模仿学习
围绕真实场景的抓取、装配、插入等任务,构建“视觉/语言/本体状态—阶段识别—策略生成”的端到端模仿学习体系。团队原创提出下意识模仿学习与行为约束克隆,显著加速收敛并提升稳定性。
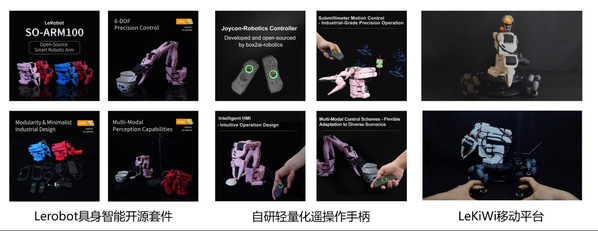
2.1.2.具身智能实训-数采中心(教育机器人)
基于低成本的 lerobot机械臂,搭建多模态数据流水线,形成可复用的数据模板与教学实验脚本,支撑高性价比的具身智能机器人实训-数采中心建设,实训课程开展等。

2.2.具身视觉语言导航
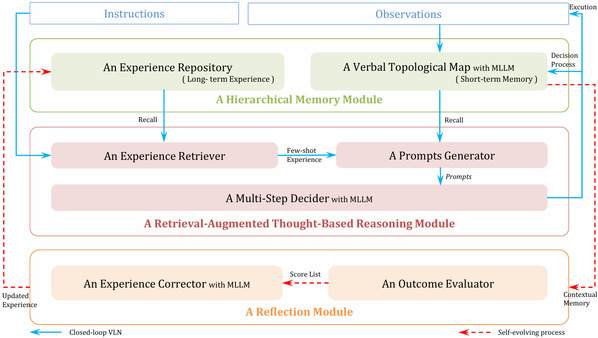
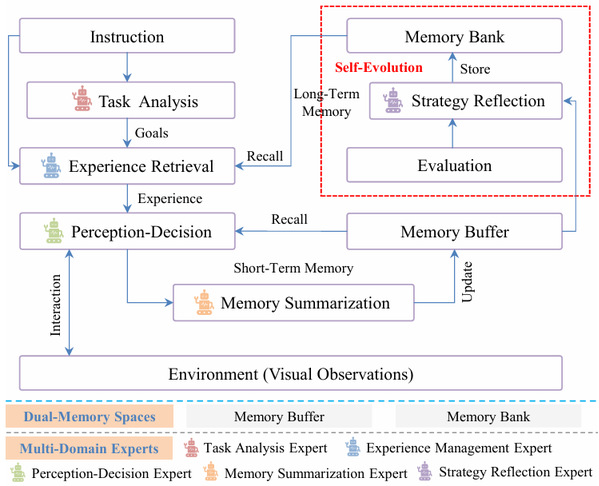
2.2.1.自进化视觉语言导航
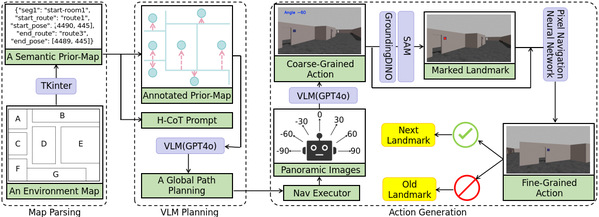
2.2.2.功能性建筑视觉语言导航
2.3.具身智能低空系统
2.3.1.具身智能低空系统大脑
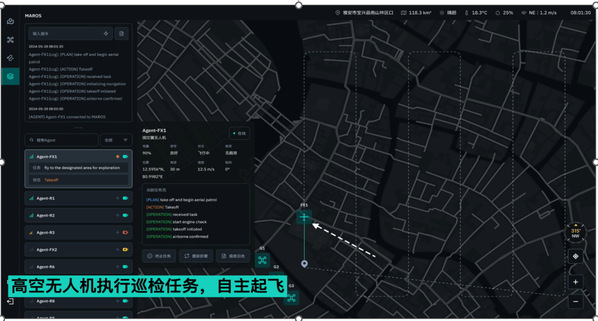
2.3.2.具身智能低空系统小脑

3.平台设施
团队设备完备、经费充裕、科研氛围浓厚:配备RTX 4090与A6000 服务器等高性能GPU算力资源;拥有宇树顶配人形机器人、方舟LIFT升降机械臂、ALOHA协作机械臂、四足机 器狗与轮足式机器狗、多传感器SLAM融合测试平台及 3D 打印机等成套硬件平台,可支撑从算法研发到系统集成与原型验证的全流程实验。
4.团队成员
现有博士、硕士研究生近三十名。
5.科研成果
(1)Jun Xie, Zhicheng Wang, Jianwei Tan, Huanxu Lin, Xiaoguang Ma, “Subconscious Robotic Imitation Learning”, ECAI, 2025
(2)Jianwei Tan,Jun Xie,Zhicheng Wang,Xiaoguang Ma,"Constrained Behavior Cloning for Robotic Learning”,IEEE IROS, 2025
(3)S. Huang, H. Zhang, K. Xu, X. Lv and Xiaoguang Ma, "M3DSS: A Multi-Platform, Multi-Sensor, and Multi-Scenario Dataset for SLAM System,"2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, 2025, pp. 14542-14549, doi: 10.1109/ICRA55743.2025.11128631.
(4)XiangyuDong, Xiaoguang Ma,"SE-VLN: A Self-Evolving Vision-Language Navigation Framework Based on Multimodal Large Language Models”, AAAI 2025
(5)Xiangyu Dong, Xiaoguang Ma,"SM-VLN: A Self-Evolving Multi-Agent Framework with Foundation Models for Vision-and-Language Navigation”, IEEE RAL
(6)Fuhai Chen, Feng Zhang, XiaoGuang Ma, Jiarong Liu, Xuri Ge,“Multi-modal Incremental Learning with Dual Class-individual Memory”, AAAI 2025
(7)Fuhai Chen,Biao Liu,junchaoyou,XiaoGuang Ma,Yanzhe Chen,Zhanghui Liu,Xuri Ge, “D-AVDN: Dual Aerial Vision-Dialog Navigation with Semantic-Spatial Constraints”, AAAI 2025
(8)Fuhai Chen,Pengpeng Huang,XiaoGuang Ma,Junwen Wu,Shiping Wang,Xuri Ge, “UAV Scene Change Captioning Based on Hierarchical Dual-Change Collaborative Learning”, AAAI 2025
(9)Yuwei He, Xiaoguang Ma , Zixi Jia, “SV-Grasp: Semantic Verification for Language-Guided Robotic Grasping”, IEEE ACIRS 2025
(10)J. Shi, P. Duan, X. Ma, J. Chi and Y. Dai, "Frefusion: Frequency Domain Transformer for Infrared and Visible Image Fusion," inIEEE Transactions on Multimedia, 2025 doi: 10.1109/TMM.2025.3543019.
(11)QianqianWang,XiaoguangMa,XiaoyuJiang,JianminJi,HonghuPan, “Towards unified bijective image–text generation for text-to-image person re-identification” , Knowledge-Based Systems,Volume 325,5 September 2025, 114014
(12)Xunhu Tao, Lunan Zheng, Xiaoguang Ma, Tong Jia, Zhijun Zhang, Wenjie Chen, “An Improved Barrier Neural Network Based Mutual Collision Avoidance Scheme for Dual Redundant Manipulators” Transactions on Industrial Electronics, 2025
(13)Pei Liang, Lunan Zheng, Xiaoguang Ma, “An Adaptive Iterative Neural Network for Redundant Manipulator with Unknown Physical Parameters” IEEE Transactions on Systems, Man and Cybernetics: Systems, 2025
(14)Tianda Zhong, Wei Meng, Xiaoguang Ma, "A Rotating Camera Based Visual-Inertial Odometry System for Drones", IEEE Robotics and Automation Letters,2025
(15)Chunchao Li, Jun Li, Mingrui Peng, Behnood Rasti, Puhong Duan, Xuebin Tang and Xiaoguang Ma, "Low-Latency Neural Network for Efficient Hyperspectral Image Classification," inIEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 18, pp. 7374-7390, 2025, doi: 10.1109/JSTARS.2025.3544583.
(16)Siyan Gu, Chunbo Luo, Yang Luo, Xiaoguang Ma, " Jointly Optimize Throughput and Localization Accuracy: UAV Trajectory Design for Multi-User Integrated Communication and Sensing," inIEEE Internet of Things Journal, doi: 10.1109/JIOT.2024.3444901
(17)Hankang Gu, Shangbo Wang, Xiaoguang Ma, Dongyao Jia, Guoqiang Mao, Eng Gee Lim, Cheuk Pong Ryan Wong, "Large-Scale Traffic Signal Control Using Constrained Network Partition and Adaptive Deep Reinforcement Learning," inIEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 7, pp. 7619-7632, July 2024, doi: 10.1109/TITS.2024.3352446.
(18)K. Xu, S. Yang, X. Ma and Z. Long, "DRMAF-Transformer: An End-to-End Adaptive Fusion Framework for Fault Diagnosis of Harmonic Drivers,"2025 5th International Conference on Sensors and Information Technology, Nanjing, China, 2025, pp. 481-486, doi: 10.1109/ICSI64877.2025.11009815.
(19)Xiaoyu Jiang, Yubin Cheng, Zhihuan Song, Xiaoguang Ma, Lingjian Ye, Zhiqiang Ge, "Swarm Learning for Secure and Effective Industrial Federated Big Data Analytics," IEEE Transactions on Reliability, doi: 10.1109/TR.2024.3431869
(20)Xiaoyu Jiang, Junhua Zheng, Ziyi Chen, Zhiqiang Ge, Zhihuan Song, Xiaoguang Ma, "Leveraging Transfer Learning for Data Augmentation in Fault Diagnosis of Imbalanced Time-Frequency Images," inIEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2024.3454418.
(21)Siyan Gu, Chunbo Luo, Yang Luo, Xiaoguang Ma, " Jointly Optimize Throughput and Localization Accuracy: UAV Trajectory Design for Multi-User Integrated Communication and Sensing," inIEEE Internet of Things Journal, doi: 10.1109/JIOT.2024.3444901
(22)Gongtao Yue, Xiaoguang Ma, Wenrui Li, Ziheng An, Chen Yang, “2MSPK-Net: A nuclei segmentation network based on multi-scale, multi-dimensional attention, and SAM prior knowledge”, Biomedical Signal Processing and Control, Volume 100, Part B, 2025, 107140, ISSN 1746-8094, https://doi.org/10.1016/j.bspc.2024.107140
(23)Zhenrui Wu,XiaoguangMa,, "A Deep Reinforcement learning and Graph Convolutional Network for Harmonic Drive Fault Diagnosis", inIEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1-10, 2025, Art no. 3529110, doi: 10.1109/TIM.2025.3547080
6.对外合作与交流
与加州大学伯克利分校、香港大学、香港科技大学、北京航空航天大学、重庆市科学技术研究院、上海AI中心、美的、长沙长泰机器人有限公司等高校与企业建立合作关系。
